94장. 능동형 전자제어 구성 및 제어
전자제어 시스템은 4개의 차고 센서와 3개의 G센서, 압력센서, 모드 선택 스위치와
CAN 통신 데이터가 있으며, 이는 ECU로 입력된다. 입력 신호를 통해, ECU는 출력요
소를 제어하게 되며, 출력요소는 밸브블럭 내부의 솔레노이드 밸브와 배기 밸브, 컴프
레서에 장착된 2개의 리버싱 밸브, 컴프레서 릴레이, 4개의 가변 댐퍼 밸브 등으로 구
성되어 있다. 이렇게 능동형 전자제어 현가장치는 다양한 센서 신호를 이용하여 차량의
높이를 제어함으로서 기계식에 비해 광범위하고 높은 수준의 제어를 할 수 있다.
가. 주요 구성
(1) 차고센서
차고센서는 앞 차고센서 2개와 뒤 차고센서 2개로 구성되며, 차체와 로워암 사이이
장착되어 차체의 상하 움직임에 따라 레버가 회전하므로 레버의 회전량의 변화로 차체
의 높이를 감지한다. 차고 센서는 가변 저항식을 사용한다.
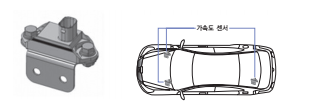
(2) 가속도 센서
가속도센서(G센서)는 차량의 상하 가속도를 감지하기 위해 앞쪽에 2개, 뒤쪽에 1개 가 장착되어 있다. ECU는 주행 상태에서 가속도센서의 출력 값을 입력받아 차량의 거
동상태를 파악 하게 되고 쇽업소버의 외부에 장착되어 있는 감쇠력 가변 솔레노이드 밸
브를 제어한다.
(3) 압력 센서
압력 센서(pressure sensor)는 밸브 블록 내부에 장착되어 있으며, 시스템 내의 압
력을 감지한다. ECS가 작동하지 않을 때는 리저버 탱크와 관련된 시스템 압력을 감지
하고, ECS가 작동할 때에는 에어 스프링 작동과 연결된 시스템의 회로의 압력을 감지
한다.

(4) ECS 모드 선택 스위치
ECS모드 선택 스위치는 운전자의 선택의지(차고/감쇠력)를 ECU에 전달하는 기능을
하며 차고를 선택하는 차고제어 스위치와 감쇠력을 선택할 수 있는 감쇠력 제어 스위
치가 있다.
① 차고 제어 스위치
차고 제어 스위치는 운전자의 선택의지에 따라 HI(높음)모드와 Normal(보통)모드를
선택할 수 있다. HI(높음)모드 선택시에는 차고가 상승되어 험로 주행시 차량의 하체를
보호할 수 있다. NORMAL(보통)모드 선택에는 ECU가 각종 센서로부터 입력되는 각종
정보를 분석하여 주행조건에 알맞은 차고를 자동으로 제어한다.
② 감쇠력 제어 스위치
감쇠력 제어 스위치는 운전자의 선택의지에 따라서 스포츠 또는 자동을 선택할 수 있
다. 스포츠(sport) 모드는 험로 및 커브길 등에서 조정 안정성을 향상시키고자 할 때 사
용한다. 자동(auto) 모드 선택시에는 ECU가 각종 센서로부터 입력되는 각종 정보를 분
석하여 주행조건에 알맞은 감쇠력을 자동으로 제어하여 부드러운 승차감을 유지한다.

(5) CAN 통신 데이터
전자제어 컨트롤 유니트는 이 외에도 여러 가지의 정보를 입력 받는데 이러한 정보는
CAN 통신을 통해 입력 받는다. 캔 통신으로 입력 받는 정보로는 엔진 토크, 엔진 회전
수, 차속, 계기판, 조향각센서 등이 있다.
나. 주요 제어
(1) 차고제어
차고제어를 위한 일반적인 제어 흐름은 [그림 12-26]과 같다. ECU는 빈번한 차고 변
화를 방지하기 위해 평균적인 차고을 추출해 내고, 목표 차고와의 오차를 이용하여 급
기 및 배기를 결정하게 된다. 밸브 선택 로직은 급기와 배기 또는 현 차고 유지에 따른
각 솔레노이드 밸브의 On/Off 여부와 리저버 탱크의 압력을 감시하여 공기압축기 작동
여부를 결정한다. 또한 차속과 조향각 등의 정보를 이용하여 차속감응 제어와 선회 시
내,외륜의 차고 차이를 보정하는 자세 제어 여부를 결정한다.
국내에 적용된 차량을 예로 들면 차고 높이는 노말(normal)모드 선택 시 크게 3단
계로 자동으로 제어된다. 노말 모드을 기준으로 했을 때, 오프로드 주행을 할 때에는
전.후륜 차고가 30mm 상승하며, 고속주행을 할 때에는 차고가 15mm 하강하게 된다.

일반적인 주행 시 차고는 차속에 연동하여 제어되는데, 노말 모드를 기준으로 했을
때, 70km/h 이하의 속도에서 하이(hi) 모드를 선택하면, 차량은 오프로드에 주행하
기 적합한 하이레벨 모드가 되어, 차체가 약 30mm 상승한다. 이 상태에서 10초 이상
70km/h 이상의 속도로 주행하면, 자동으로 하이레벨 모드에서 노말모드로 제어된다.
그리고, 10초 이상 120km/h 이상의 속도로 주행하면, 고속 주행에 적합한 로우 레벨로
변경되어, 차체가 약 15mm 하강하게 된다. 이 때, 차속이 80km/h 이하로 5초 이상 지
속되거나, 40km/h 이하로 떨어지게 되면, 다시 노말 모드로 제어된다.
(2) 감쇠력 제어
감쇠력은(damping force) 오토(auto) 모드 선택 시 급 출발, 급제동, 선회 시에는 감
쇠력을 증대 시키고, 일반적인 주행시에는 감쇠력을 저감하여 부드럽고 안락한 운전이
가능하도록 제어한다. 스포츠(sport) 모드를 선택하는 경우에는 감쇠력으로 증대하여
조종 안정성 및 선회 안정성을 극대화 한다.
(3) 자세제어
주행 중에는 노면의 상태, 주행조건, 그리고 운전자의 의도에 따라 차량의 자세에
여러 가지 변화가 일어난다. 즉 차량이 주행 중에 노면의 상태에 따라 차체가 상하로 움
직이게 되고 이를 바운스(bounce)라 하며, 차량이 선회할 때는 원심력에 의해 차체가
바깥 방향으로 기울어지게 되고 이를 롤(roll)이라 한다.

운전자가 차량을 감속하거나 제동할 때는 차체가 관성에 의해 앞쪽으로 기울어지게
되고 이를 다이브(dive), 가속 시에는 차체가 뒤쪽으로 기울어지고 이를 스쿼트(squat)
라 하며 다이브와 스쿼트가 반복되어 일어나면 이를 피칭(pitching)이라 한다. 또한 주
행 중에는 항상 차량의 중심에 대해 회전하려고 하는 요(yaw) 현상도 발생한다. 차량의
주행안정성을 유지하기 위해서는 이러한 차량의 다양한 자세변화에 대응할 수 있는 안
전장치가 필요하며, 롤 제어를 위해서는 스태빌라이저(stabilizer)가 사용되고 있다. 바
운스 제어를 위해서는 가속 센서를 차체에 장착하여 상하운동 가속도인 중력가속도를
측정하여 차체의 상하운동(bounce motion)을 판단해서 이를 억제하는 방향으로 제어
해 준다. 자세제어(active control)란 주행 중 발생하는 롤(roll), 스쿼트(squat), 다이브
(dive), 피칭(pitching), 바운싱(bouncing)등을 포함한 그 밖의 차체 변화에 대해 적극
적으로 대응함으로서 항상 최적의 주행안정성을 확보하는 제어를 말한다.
① 안티 롤(anti-roll) 제어
롤(roll)은 자동차가 주행 중 핸들을 조작하여 선회하게 되면 좌우로 흔들리는 현상이
다. 차체는 원심력에 의해 선회하는 차체의 내측은 올라가고 외측은 내려간다. 이로 인
하여 차체는 내측으로 더욱 쏠리게 되어 조향성이 불량해진다. 이때 ECS 컴퓨터는 조
향 휠 각속도 센서, 차속 센서,“G”센서의 신호를 기초로 하여 차량의 속도와 핸들의 조
작속도, 차체에 발생되는 쏠림 정도(G)를 판단하여 아래와 같이 쇽업소버의 감쇠력 변
환과 공기 스프링에 공기를 급,배기 함으로서 롤을 방지한다.

② 안티 스쿼트(anti-squat) 제어
차량을 출발시키거나 가속을 하기 위해 액셀러레이터 페달을 급격하게 밟으면 차량
의 무게 중심이 뒤쪽으로 이동하면서 차량의 앞쪽을 올라가고 뒤쪽은 내려간다. 이러
한 차체의 자세를 스쿼트라 하며, 이로 인해 전륜 구동형의 차량인 경우 접지 구동력이
적어지게 되어 슬립이 발생될 수 있으며, 급가속시 조향 휠의 접지력 부족으로 조향 안
정성이 저하될 수 있다. 이때 ECS 컴퓨터는 차속 신호와 스로틀 위치센서의 신호를 기
초로 급출발 또는 급가속이 판단되면 전륜의 공기 스프링은 배기하고 후륜의 공기 스
프링에는 급기하며, 쇽업소버의 감쇠력은 미듐 또는 하드하게 변환시켜 스쿼트 현상을
방지한다.

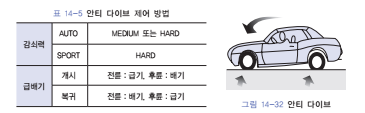
③ 안티 다이브(anti-dive) 제어
다이브는 자동차가 주행 중 브레이크 페달을 밟으면 차량의 무게 중심이 앞쪽으로
이동하면서 차체의 앞쪽은 내려가고 차량의 뒤쪽은 들리게 현상으로 노즈 다운(nose
down)이라고도 한다. 이때 ECS 컴퓨터는 일정속도 이상에서 브레이크 페달을 밟으면
브레이크 스위치 신호와 차속 센서의 신호를 기초로 하여 감속도를 계산하여 전륜의 공 기 스프링에는 급기하고 후륜 공기 스프링에는 배기하며, 쇽업소버의 감쇠력은 미듐 또
는 하드로 변환하여 다이브 현상을 방지한다.
④ 안티 피칭/바운싱(anti-pitching/bouncing)
피칭은 스쿼트와 다이브 현상이 교대로 반복되는 현상이며, 바운싱은 차체가 전체적
으로 균일하게 상하로 직진하는 진동 현상으로 요철이 심한 도로를 주행하는 경우에 발
생된다. 이때 ECS 컴퓨터는 차고 센서로 부터 스트로크 주파수를 검출하게 되면 스트
로크 변화(피칭, 바운싱)에 대하여 쇽업소버의 감쇠력은 소프트(soft)에서 하드(hard)로
변환시키고 공기 스프링에는 급배기를 하여 안티 피칭, 바운싱 제어를 실행한다.

⑤ 안티 시프트 스쿼트(anti-shift squat)
자동변속기 차량이 정지 상태에서 승객의 승하차나 변속레버를 조작시에 발생하는
차량의 진동을 시프트 스쿼트라 한다. 이때 전자제어 유니트는 자동변속기의 P.N 위치
를 검출한다. 차량의 정지 상태에서 승객의 승하차나 변속레버 조작시에 발생할 수 있
는 차량의 진동을 예측하여 쇽업소버의 감쇠력을 소프트(soft)에서 하드(hard)로 변환
시키며, 전륜 공기 스프링에는 배기하고 후륜 공기 스프링은 급기한다. 차량이 출발하여 규정 속도 이상이 되면 다시 쇽업소버의 감쇠력은 소프트(soft)로 복귀시키고 전륜 공
기 스프링은 급기시키고 후륜 공기 스프링은 배기시켜 시프트 스쿼트 제어를 실행한다.

⑥ 고속 주행안정성 제어
차량이 고속으로 주행하게 되면 주행 안정성을 높이기 위하여 ECS 컴퓨터는 차속 센
서의 신호를 기준으로 쇽업소버의 감쇠력은 소프트(soft)에서 미듐(medium)으로 변화
시키며, 차속이 일정 속도로 감속되면 해제시킨다. 주행중 차속 센서를 통해 차속을 검
출하여 차속이 100km/h를 초과하게 되면 고속안정성을 확보하기 위해 컴퓨터는 쇽업
소버의 감쇠력 및 차고를 제어한다. 차속이 90km/h 이하로 감속되면 쇽업소버의 감쇠
력과 차고를 복귀시킨다.

⑦ 악로 주행
자동차가 주행 중 악로를 검출하면 급속히 차고를 올린다. 차량이 저속(3km/h≤차
속<40km/h) 상태에서 악로 검지시 제어한다. 악로란 전륜측 차고 센서가 2초 이내에
HI 이상을 2회 이상 출력되고, 후륜측 차고 센서가 2초 이내에 LL 이하를 2회 이상 출
력될 때 판정한다.
ⓐ 악로 조건에 해당되면 차고를 하이(high)로 올린다.
ⓑ 급기 제어중에는 감쇠력을 하드(hard)로 제어하고 급배기 개시 1초 후에 감쇠력
을 복귀시킨다.

'자동차셰시' 카테고리의 다른 글
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 96장. 공기 현가장치와 승차감 (5) | 2023.09.04 |
|---|---|
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 95장. 능동형 전자제어 구성 및 기능 (5) | 2023.09.03 |
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 93장. 능동형 전자제어 현가장치 주요 구성 부품 (6) | 2023.09.01 |
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 92장. 능동형 전자제어 현가장치 개요 (6) | 2023.08.31 |
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 91장. 반 능동형 전자제어 주요 제어 기능 (12) | 2023.08.30 |



