91장. 반 능동형 전자제어 주요 제어 기능

감쇠력 가변식 현가장치는 각종 센서의 정보로 차량의 운동 상태를 판단하여 차량
상태가 최적이 되도록 감쇠력을 조절함으로서 승차감과 주행안정성을 향상시킨다. 차
량의 운동 상태는 자동차의 주행 환경이나 운전자의 조작 등에 의해서 유발된다. 이러
한 운동은 크게 수직, 횡, 종 방향의 3방향 운동과 차속의 변화로 구분할 수 있으며 일
반적으로 아래와 같이 제어한다.
(1) 수직 방향 운동(피칭·바운싱) 감지 및 제어
차체나 차축에 장착되는 G-센서(수직 가속도센서) 또는 차체와 차축 사이에 연결된
차고센서를 이용한다. 수직 방향의 승차감 제어는 일반적으로 G-센서를 이용하여 수행 한다. 만약 G-센서가 전후로 각각 하나 이상씩 장착되어 있다면 바운스 뿐만 아니라 피
치 운동에 대해서도 제어가 가능하며, 좌우로 장착되어 있다면 롤 운동에 대한 제어도
가능하다. 또 G-센서를 이용하여 노면의 특성도 검출해 낼 수 있는데, 고주파 성분이
많은 험로의 경우에 감쇠력을 중간 정도로 조절하여 충격이 과도하게 크지 않으며 타이
어의 접지력을 잃지 않도록 조절할 수도 있다. 굴곡이 심한 도로나 둔턱에서는 감쇠력
을 강하게 하여 차체의 거동을 수평하게 할 수 있다. 승차감 제어는 기본적으로 피드백
제어인데, 이는 노면 형상이 타이어를 통해 차체에 진동으로 전달되고 G-센서가 이 진
동을 감지하여 제어를 수행하기 때문이다.
(2) 횡 방향 운동(롤) 감지 및 제어
횡 가속도센서나 조향각 센서가 사용되며 경우에 따라서는 ABS용으로 사용되는 휠
센서등을 이용한다. 횡 방향의 롤(roll) 제어는 차속과 조향 각속도로부터 차량의 횡가
속도 변화를 계산하여 감쇠력을 하드(hard)하게 설정하여 차량의 롤을 억제하여 주행안
정성을 높인다. 이 때 전후의 감쇠력 배분을 다르게 하면 요(yaw)운동 특성도 조절이 가
능하고 차량의 조향 특성을 언더스티어(under-steer)나 오버스티어(over-steer)로 튜
닝하는 것도 가능해 진다. 조향각 센서 대신에 횡가속도센서를 직접 사용하기도 한다.
(3) 종 방향 운동(다이브·스쿼트) 감지 및 제어
차속센서, 브레이크센서, 스로틀포지션센서(TPS) 등이 이용한다. 종 방향의 다이브
제어는 제동시 감속도에 의해서 전후로 하중 이동이 발생하여 차체 전방이 하강하는 현
상을 방지하기 위하여 감쇠력을 전륜은 압축 하드(hard), 후륜은 인장 하드(hard)로 제
어한다. 역시 종 방향 운동인 스쿼트 제어는 출발시 차체 전방부가 들어 올려지는 현상
을 방지하기 위해서 스로틀포지션센서(TPS)나 엔진 회전수를 감지하여 설정값 이상인
경우, 감쇠력을 전륜은 인장 하드(hard), 후륜은 압축 하드(hard)로 제어한다.
(4) 차속 감응제어
차속 감응 제어는 고속에서는 차량의 안정성이 승차감보다 중요하므로 일정속도 이
상에서는 감쇠력의 크게 하여 전체적으로 차체의 거동이 최소화 한다. 반대로 저속에서
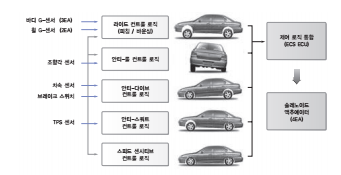
는 감쇠력을 작게하여 부드럽고 안락한 승차감을 확보한다. [그림 14-10]은 차량 운동
방향별 제어기능과 사용되는 센서의 예를 나타낸 것이다.