46장. TOD 방식 4륜구동 장치
가. 개요
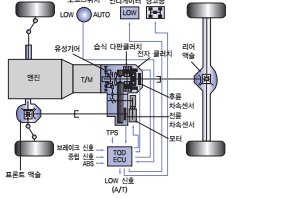
TOD(Torque On Demend)는 전자식 4륜 구동 장치로, 모드스위치는 AUTO 모드와
LOW 모드로 구분된다. AUTO 모드에서는 전후륜 구동력을 도로의 조건과 운전자의 의


지, ABS의 작동등 여러 신호를 받아 0:100∼50:50으로 TCCU가 자동으로 제어한다.
또한 AUTO↔LOW로 절환시에는 차량이 반드시 정지된 상태에서 자동 변속기는 중립
이 되어야 한다. LOW 모드가 선택되면 큰 구동력을 갖기 위해서 자동변속기의 경우 4
속 변속을 금지한다.
기계식 풀 타임(Full-Time) 4륜 구동 장치 대비 장점은 다음과 같다.
① 전·후륜의 구동력이 적절히 배분됨으로써 연료 소비율이 좋다.
② 구동력이 전·후륜으로 적절히 배분되어 바퀴의 접지력이 최적으로 유지된다.
③ 노면 변화에 따른 반응이 신속하다.
④ 기존 장치보다 경량화가 가능하다.
⑤ 내부 구조가 간단하다.
⑥ 비포장 도로 및 포장 도로에서 직진 안정성 및 주행 성능이 우수하다.
⑦ 주행 중 차량 핸들링이 우수하다.
⑧ ABS장치와 연계 및 조화가 용이해 ABS장치 작동이 효과적이다.
나. 작동 원리
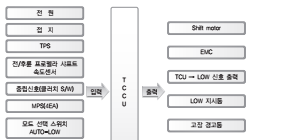
AUTO모드의 작동은 TCCU가 각종 센서 정보를 이용하여 전.후륜 바퀴의 구동력을
결정하고 EMC를 듀티 제어 한다. EMC의 자화 정도에 따라 EMC 하우징과 다판 클러
치 사이에 있는 어플라이 캠이 작동되고 캠의 작동에 의해 다판 클러치가 작동하여 전
륜으로 구동력을 0:100∼50:50으로 제어한다. LOW 모드의 작동은 EST 방식 4L 모드작동시와 동일하다.

<AUTO모드의 제어 기능과 구동력 배분>
| NO | 제어기능 | 전/후륜 구동력 배분 | 판정요소 |
| 1 | 급발진 제어 | 급발진시 발진성능 향상을 위하여 전륜과 후륜의 구동력을 50:50으로 배분 |
- 스로틀 밸브 개도 - 차속 - 전/후륜의 속도차 |
| 2 | 일반 주행 제어 | 직선로에서 연비향상 및 주행 안정성 확보를 위하여 전륜과 후륜의 구동력을 0:100~30:70으로 배분 |
- 스로틀 밸브 개도 - 차속 - 전/후륜의 속도차 |
| 3 | 추월 가속 제어 | 직선로에서 추월 가속성 및 주행 안정성 확보를 위하여 전륜과 후륜의 구동력을 30:70~50:50으로 배분 |
- 스로틀 밸브 개도 - 차속 - 전/후륜의 속도차 |
| 4 | 일반로 선회 제어 | 선회 및 주행 안정성 확보를 위하여 전륜과 후륜의 구동력을 20:80~30:70으로 배분 |
- 스로틀 밸브 개도 - 차속 - 전/후륜의 속도차 |
| 5 | 마찰계수가 작은 도로 주행 및 선회 제어 |
- 미끄러짐을 최소화하기 위하여 전륜과 후륜의 구동력을 30:70~40:60으로 배분 - 선회 및 주행 안정성 확보를 위하여 전륜과 후륜의 구동력을 30:70~40:60으으로 배분 |
- 스로틀 밸브 개도 - 차속 - 전/후륜의 속도차 |
| 6 | 주차시 제어 | 주차시 선회성 확보를 위하여 전륜과 후륜의 구동력을 5:95~10:90으로 배분 |
- 스로틀 밸브 개도 - 차속 - 전/후륜의 속도차 |
| 7 | 제동시 제어 | 제동 안정성 및 제동거리 확보를 위하여 전륜과 후륜의 구동력을 0:100~10:90으로 배분 |
- 차속 - 전/후륜의 속도차 |
| 8 | ABS 작동시 제어 | ABS 작동에 의한 제동 안정성 확보를 위하여 구동력을 30:70으로 배분 |
- ABS 신호 - 전/후륜의 속도차 |
다. 전자제어 장치의 구성
(1) AUTO-LOW 절환 스위치
각 모드를 절환하기 위한 스위치로 AUTO↔LOW를 운전자의 의지에 의해 결정할 수 있다.
(2) 전·후륜 프로펠러 샤프트 스피드 센서
전·후륜의 프로펠러 샤프트의 회전 속도와 속도 차이를 TCCU가 입력 받아 구동력
배분량을 결정하는 기준 신호로 사용하며, 주행 및 노면 상태에 따라 EMC를 듀티 제어
하여 전륜의 구동력을 최적으로 제어 한다. 또한 후륜 스피드 센서 신호가 175rpm이하
시(정차 시) AUTO↔LOW로 절환 될 수 있도록 한다.
(3) 모터 포지션 센서
모터 포지션 센서는 총 4개가 있으며 시프트 모터 내부에 장착이 되어 있다. TCCU가
스위치의 신호를 받아 시프트 모터를 작동 시키면 MPS 4개에서 출력값의 변화가 생긴
다. TCCU가 MPS의 신호를 피드백 받아 모터의 위치를 판단한다.
(4) 악셀 포지션 센서
TCCU는 악셀 포지션 센서(APS : Accelerator Position Sensor) 신호를 입력받아 가
속성능을 향상 시키기 위하여 전.후륜의 구동력을 제어를 한다.
(5) 시프트 모터
4H↔4L로 절환을 가능하게 하는 기능을 수행하며, TCCU에 의해 제어된다.
(6) ABS작동 신호
AUTO모드로 작동되고 있을 때 ABS작동 신호가 입력되면 TCCU는 ABS의 작동 효과
를 최대로 하기 위해 전.후륜 바퀴의 구동력을 30:70으로 고정한다.
(7) 자동 변속기 중립 신호
4H에서 4L로 절환하기 위한 조건으로 자동 변속기는 중립(수동 변속기는 클러치 ON)
신호가 필요하다.
(8) EMC 코일
EMC(Electronic Magnet Clutch) 코일은 EST 방식과 달리 EMC 자화의 정도에 따라 전륜으로 전달되는 구동력이 달라진다. TCCU는 여러 센서 신호를 받아 EMC를 듀티 제
어하여 구동력을 안정적으로 제어한다.
(9) 지시등 및 경고등
운전자의 스위치 선택에 따라 계기판에 지시등이 각각 점등 되며 장치에 고장이 발생
되면 4H 램프가 점멸하여 운전자에게 고장임을 알려 준다.
'자동차셰시' 카테고리의 다른 글
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 48장. 조향장치의 종류 (9) | 2023.07.15 |
|---|---|
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 47장. 조향장치 개요 (8) | 2023.07.14 |
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 45장. 풀타임 4륜 구동장치 개요 (10) | 2023.07.13 |
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 44장. EST 방식 4륜구동 장치 (11) | 2023.07.12 |
| 자동차학과, 자동차 정비 기능사 등 차의 모든것 자동차 셰시 핵심 요점 43장. 파트타임 방식 개요 (31) | 2023.07.11 |



